UChile Robotics Team
This section contains some of the projects I was involved in during my time as a member of the UChile Robotics Team, where we participated multiple times in the Robocup Standard Platform League, a humanoid robot football competition.
1. Learning Interactively to Dribble a Ball
1.1. Interactive Real-World Feedback for Robot Dribbling
This project involved developing an interactive framework that allows real-time feedback from a remote controller to a robot, aimed at improving its dribbling behavior directly in the robot’s embodiment using COACH. This approach eliminates the reality gap that existed in the previous version of the framework, where feedback was provided to the robot in a simulator.

Project members:
R. Pérez-Dattari, C. Celemin, and J. Ruiz del Solar
2018
1.2. Learning to Dribble from Human Corrective Feedback
This project involved extending the COACH framework, which enables humans to teach robots behaviors through online corrective feedback, to incorporate the velocity of a ball when a robot is being taught to dribble. As a result, the dribbling behavior obtained is more reactive and effective.
 Without velocity
With velocity
Without velocity
With velocity
Paper:
Project members:
C. Celemin, R. Pérez-Dattari, J. Ruiz del Solar, and M. Veloso
2017
2. Robot Pose Estimation System
This project involved the use of classical computer vision techniques to develop a robot pose estimation system based on cameras placed above the football field. The objective was to create a system that could serve as ground truth for the onboard state estimation systems operating in the humanoid robots.
Project members:
R. Pérez-Dattari, P. Cano, M. Mattamala, and J. Ruiz del Solar
2017
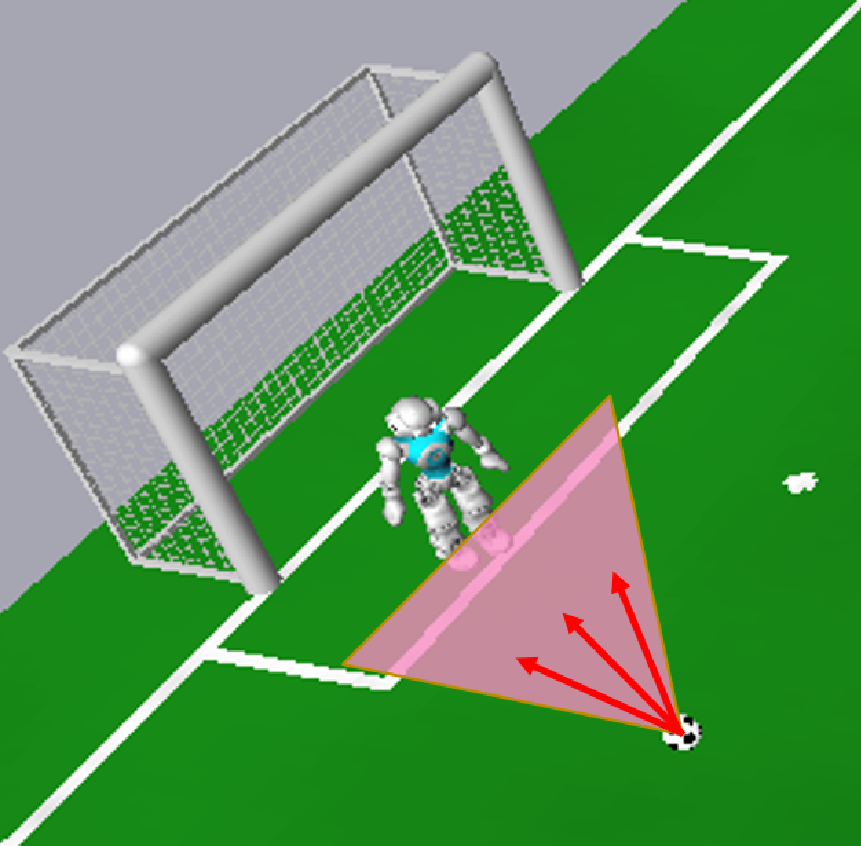
3. Learning Goalie Behaviors with Reinforcement Learning
In this project, we explored learning goalie behaviors using Reinforcement Learning (RL). This was achieved using a C++ RL library, where the robot learned to position itself correctly and decide when to activate a ball-catching behavior.
Project members:
R. Pérez-Dattari*, K. Lobos*, and J. Ruiz del Solar
*Authors contributed equally
2017